



 Télécharger(28.72KB)
Télécharger(28.72KB) 1.0
1.0
 6.1MB
6.1MB
7.6
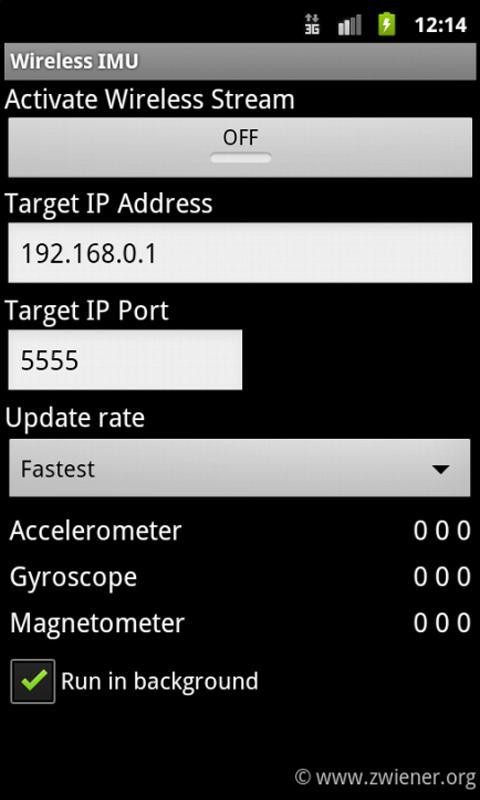
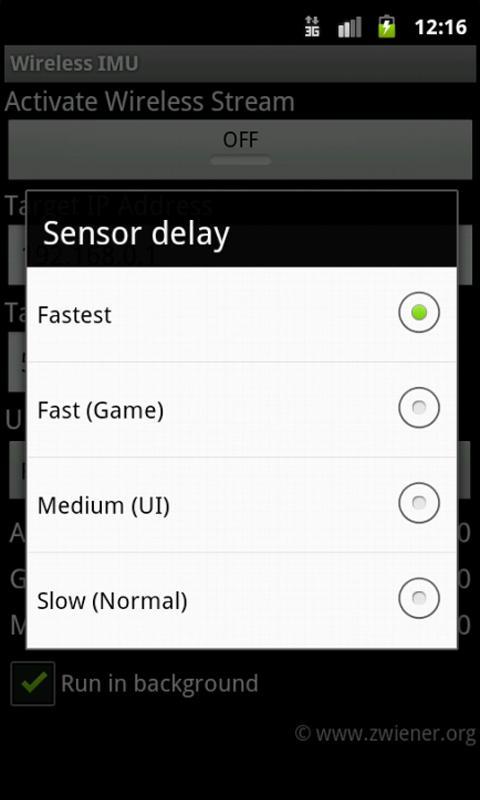
Transformez votre smartphone en une unité de mesure inertielle sans fil (IMU).
Cette application envoie les mesures à partir de vos capteurs d'inertiels de téléphone via UDP en tant que CSV (valeurs séparées par des virgules) à un ordinateur de votre réseau.
Cela transforme votre téléphone en une unité de mesure inertielle sans fil (IMU).
Les capteurs suivants sont pris en charge:
- accéléromètre
- gyroscope
- magnétomètre
Si votre téléphone n'a pas tous ces capteurs, seules les données de capteur disponibles sont transmises.
Exemple de paquet UDP:
890.71558, 3, 0,076, 9.809, 0,565, 4, -0,559, 0,032, -0,134, 5, -21,660, -36,960, -28.140
Timestamp [sec], sensorid, x, y, z, sensorid, x, y, z, sensorid, x, y, z
ID du capteur:
3 - Accéléromètre (m / s ^ 2)
4 - gyroscope (rad / s)
5 - Magnetomètre (Micro-Tesla UT)
Vous pouvez exécuter cette application en arrière-plan.
Une boîte de dialogue d'avertissement apparaît, si vous n'êtes pas connecté à un réseau WiFi.
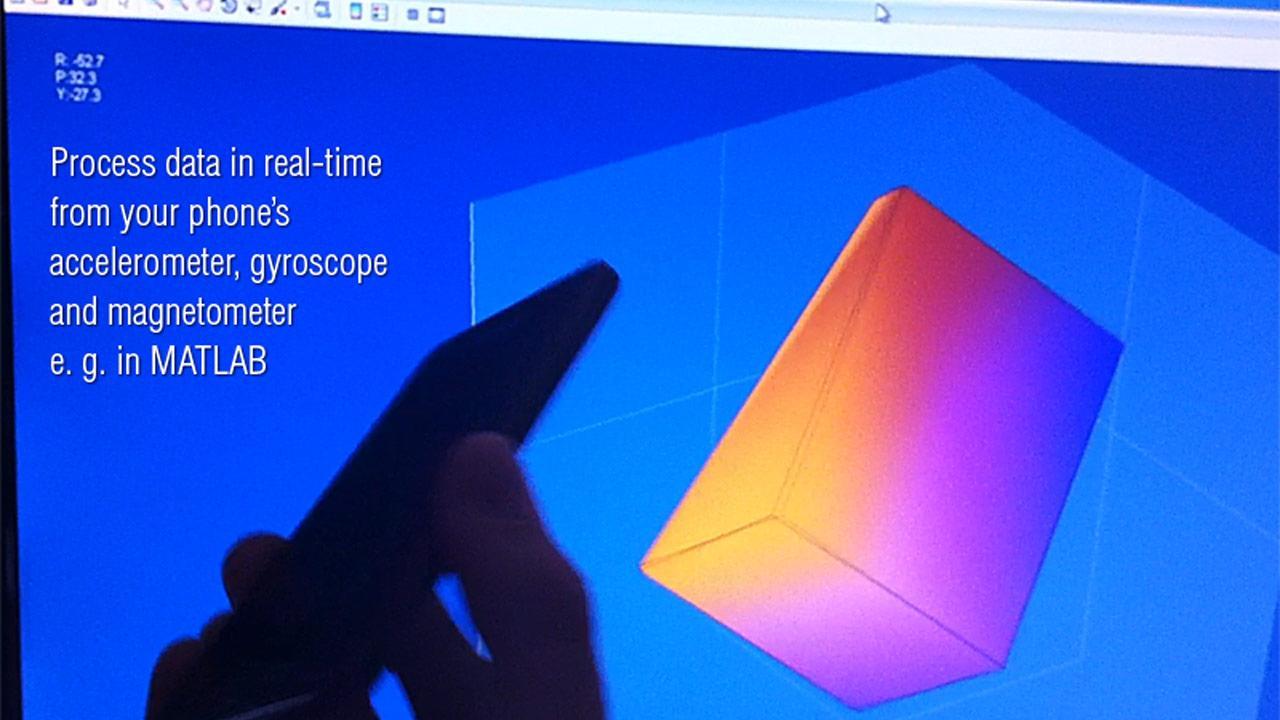
Dans l'exemple de vidéo, le flux est directement traité par un script MATLAB pour le filtrage de Kalman. Mais c'est à vous, ce que vous faites avec les données.
Avec le script Python suivant, vous pouvez capturer le flux de données UDP à partir de votre téléphone:
# -------------------------------------------------------
Importer la prise, traceback
host = ''
port = 5555
s = socket.socket (socket.af_inet, socket.sock_dgram)
S.Setsockopt (socket.sol_socket, socket.so_reuseaddr, 1)
S.Setsockopt (socket.sol_socket, socket.so_broadcast, 1)
S.Bind ((hôte, port))
tandis que 1:
essayer:
Message, adresse = s.recvfrom (8192)
message d'impression
Sauf (KeyboardInterrupt, SystemExit):
augmenter
sauf:
traceback.print_exc ()
# -------------------------------------------------------
 Recommandations similaires
Recommandations similaires
January 22, 2026
January 22, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 20, 2026