



 Скачать(28.72KB)
Скачать(28.72KB) 1.0
1.0
 6.1MB
6.1MB
7.6
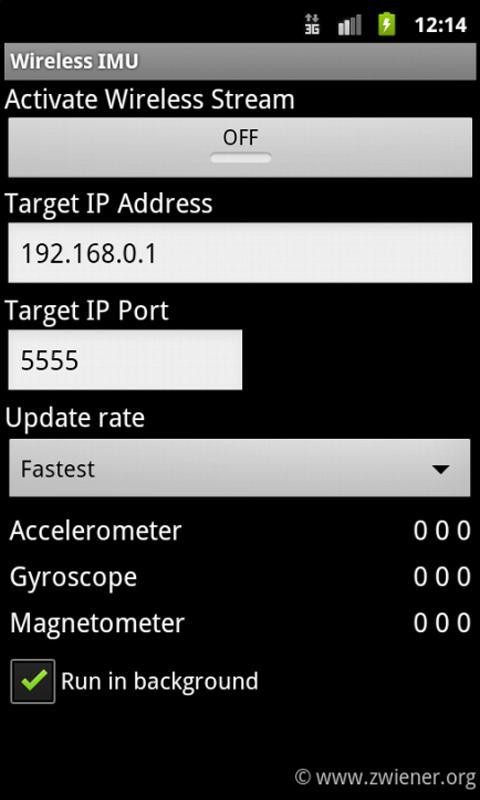
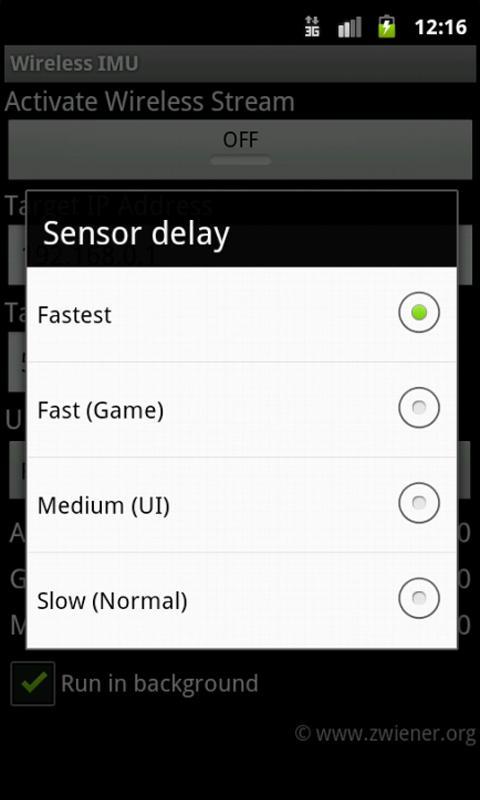
Превратите свой смартфон в беспроводную инерционную измерительную единицу (IMU).
Это приложение отправляет измерения из инерционных датчиков вашего телефона через UDP в качестве CSV (разделенные запятые значения) на компьютер в вашей сети.
Это превращает ваш телефон в беспроводную инерционную единицу измерения (IMU).
Поддерживаются следующие датчики:
- Акселерометр
- Гироскоп
- магнитометр
Если у вашего телефона нет всех этих датчиков, передаются только доступные данные датчика.
Пример UDP Packet:
890,71558, 3, 0,076, 9,809, 0,565, 4, -0,559, 0,032, -0,134, 5, -21,660, -36,960, -28,140
TimeStamp [Sec], Sensorid, X, Y, Z, Sensorid, X, Y, Z, Sensorid, X, Y, Z
Идентификатор датчика:
3 - Акселерометр (м/с^2)
4 - Гироскоп (рад/с)
5 - Магнитометр (Micro -Tesla UT)
Вы можете запустить это приложение в фоновом режиме.
Появляется предупреждающий диалог, если вы не подключены к сети Wi -Fi.
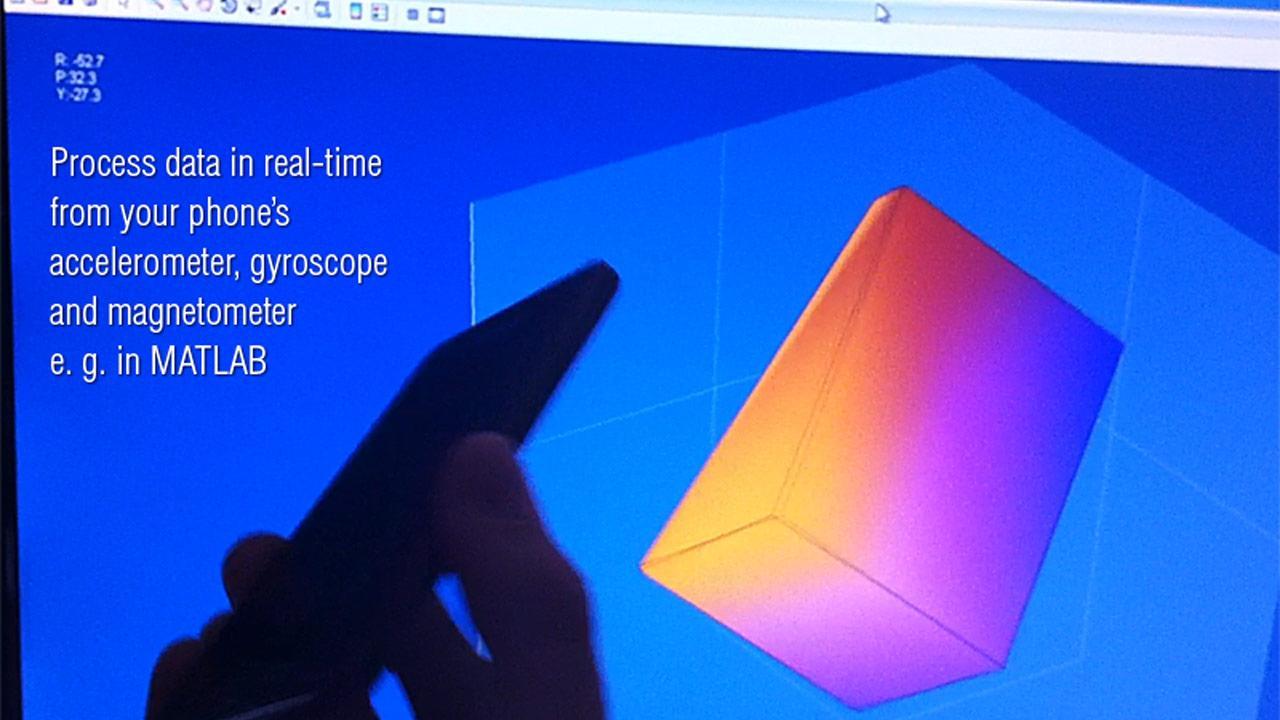
В примере видео поток напрямую обрабатывается сценарием Matlab для фильтрации Калмана. Но это зависит от вас, что вы делаете с данными.
С помощью следующего скрипта Python вы можете захватить поток данных UDP с вашего телефона:
# -------------------------------------------------------
Импорт розетка, трассировка
host = ''
Порт = 5555
s = socket.socket (socket.af_inet, socket.sock_dgram)
s.setsockopt (socket.sol_socket, socket.so_reuseaddr, 1)
s.setsockopt (socket.sol_socket, socket.so_broadcast, 1)
S.Bind ((хост, порт))
Пока 1:
пытаться:
Сообщение, Адрес = S.RecvFrom (8192)
печатное сообщение
кроме (keyboardintrupt, SystemExit):
поднимать
кроме:
traceback.print_exc ()
# -------------------------------------------------------
 Похожие рекомендации
Похожие рекомендации
January 22, 2026
January 22, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 20, 2026