



 下载(28.72KB)
下载(28.72KB) 1.0
1.0
 6.1MB
6.1MB
7.6
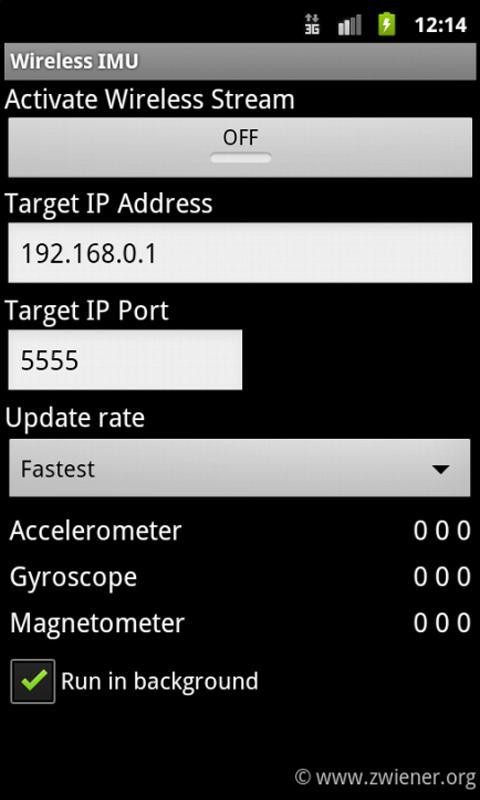
将智能手机变成无线惯性测量单元(IMU)。
该应用程序通过UDP将CSV(逗号分隔值)从手机惯性传感器发送到网络中的计算机。
这将您的手机变成无线惯性测量单元(IMU)。
支持以下传感器:
- 加速度计
- 陀螺仪
- 磁力计
如果您的手机还没有所有这些传感器,则仅传输可用的传感器数据。
示例UDP数据包:
890.71558,3,0.076,9.809,0.565,4,-0.559,0.032,-0.134,5,-21.660,-36.960,-28.140
时间戳[sec],sensorid,x,y,z,sensorid,x,y,z,sensorid,x,y,z
传感器ID:
3-加速度计(m/s^2)
4-陀螺仪(rad/s)
5-磁力计(微型tesla UT)
您可以在后台运行此应用。
如果您未连接到WiFi网络,则会出现警告对话框。
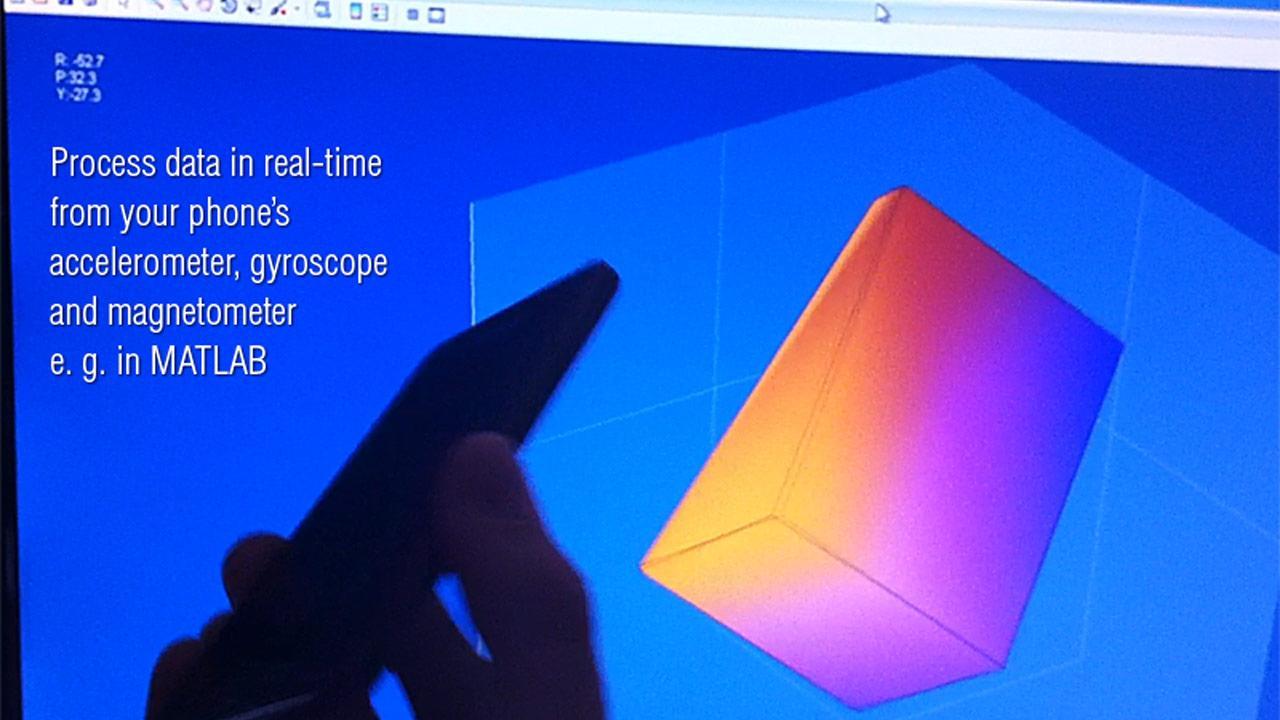
在示例视频中,该流是由MATLAB脚本直接处理的,用于Kalman过滤。但这取决于您,您对数据的作用。
使用以下Python脚本,您可以从手机捕获UDP数据流:
#-----------------------------------------------------------------------------------
导入套接字,追溯
主机=''
端口= 5555
s = socket.socket(socket.af_inet,socket.sock_dgram)
S.Setsockopt(socket.sol_socket,socket.so_reuseaddr,1)
S.Setsockopt(socket.sol_socket,socket.so_broadcast,1)
S.Bind((主机,端口))
而1:
尝试:
消息,地址= s.recvfrom(8192)
打印消息
除了(键盘介入,系统exit):
增加
除了:
trackback.print_exc()
#-----------------------------------------------------------------------------------
 类似推荐
类似推荐
January 22, 2026
January 22, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 20, 2026