



 下載(28.72KB)
下載(28.72KB) 1.0
1.0
 6.1MB
6.1MB
7.6
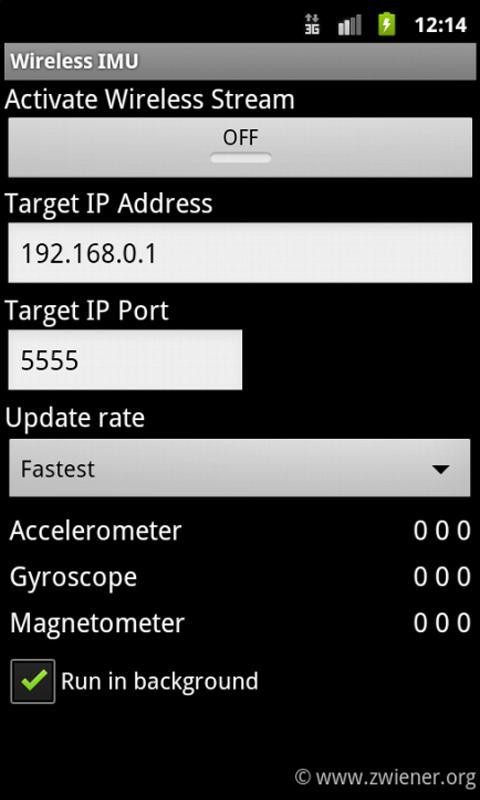
將智能手機變成無線慣性測量單元(IMU)。
該應用程序通過UDP將CSV(逗號分隔值)從手機慣性傳感器發送到網絡中的計算機。
這將您的手機變成無線慣性測量單元(IMU)。
支持以下傳感器:
- 加速度計
- 陀螺儀
- 磁力計
如果您的手機還沒有所有這些傳感器,則僅傳輸可用的傳感器數據。
示例UDP數據包:
890.71558,3,0.076,9.809,0.565,4,-0.559,0.032,-0.134,5,-21.660,-36.960,-28.140
時間戳[sec],sensorid,x,y,z,sensorid,x,y,z,sensorid,x,y,z
傳感器ID:
3-加速度計(m/s^2)
4-陀螺儀(rad/s)
5-磁力計(微型tesla UT)
您可以在後台運行此應用。
如果您未連接到WiFi網絡,則會出現警告對話框。
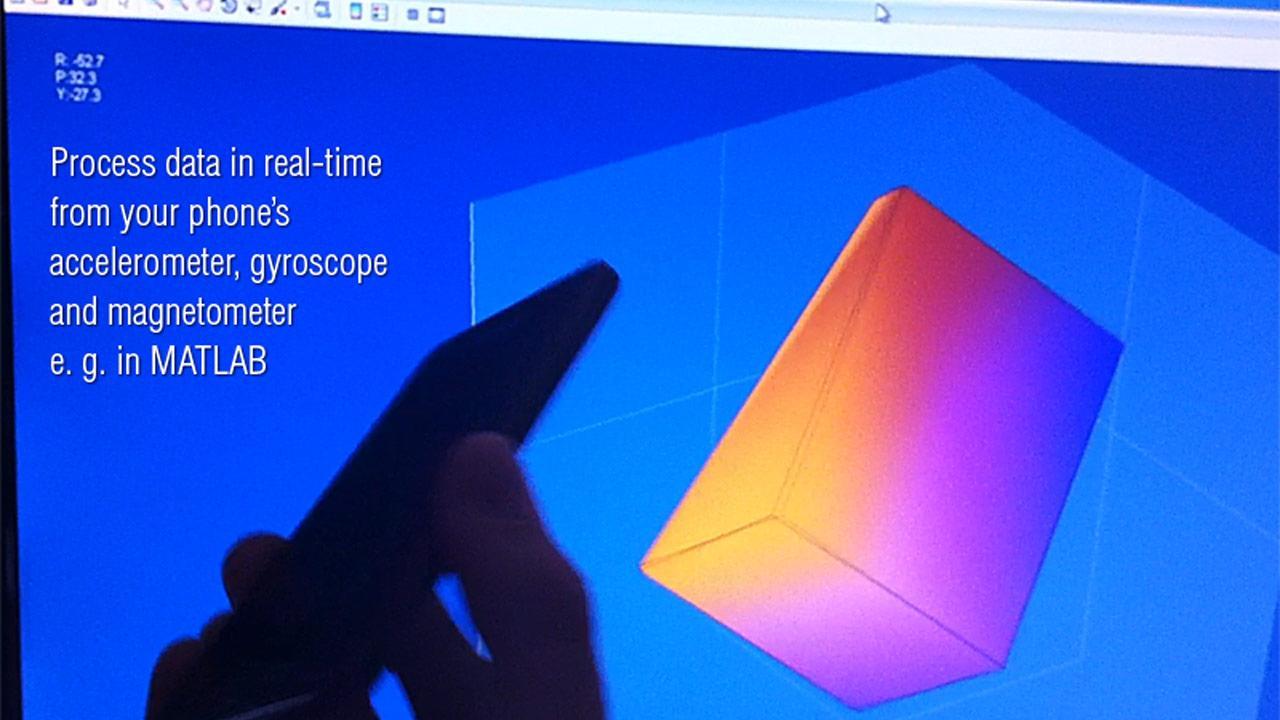
在示例視頻中,該流是由MATLAB腳本直接處理的,用於Kalman過濾。但這取決於您,您對數據的作用。
使用以下Python腳本,您可以從手機捕獲UDP數據流:
#-----------------------------------------------------------------------------------
導入套接字,追溯
主機=''
端口= 5555
s = socket.socket(socket.af_inet,socket.sock_dgram)
S.Setsockopt(socket.sol_socket,socket.so_reuseaddr,1)
S.Setsockopt(socket.sol_socket,socket.so_broadcast,1)
S.Bind((主機,端口))
而1:
嘗試:
消息,地址= s.recvfrom(8192)
打印消息
除了(鍵盤介入,系統exit):
增加
除了:
trackback.print_exc()
#-----------------------------------------------------------------------------------
 類似推薦
類似推薦
January 22, 2026
January 22, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 20, 2026