



 ダウンロード(28.72KB)
ダウンロード(28.72KB) 1.0
1.0
 6.1MB
6.1MB
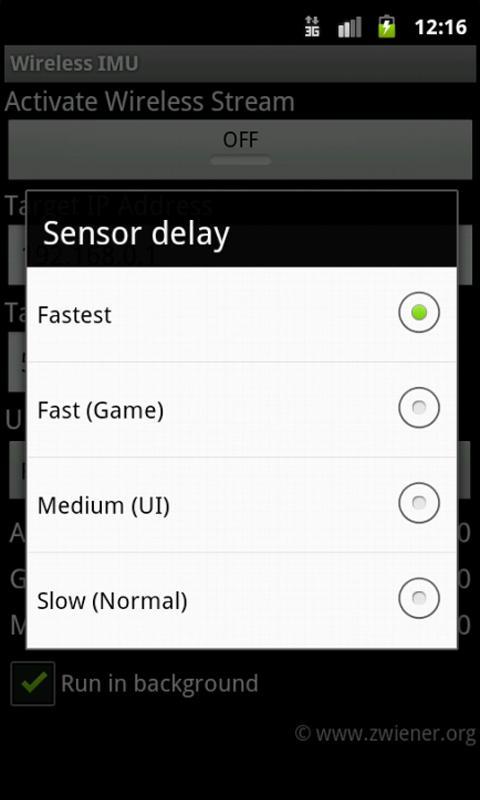
7.6
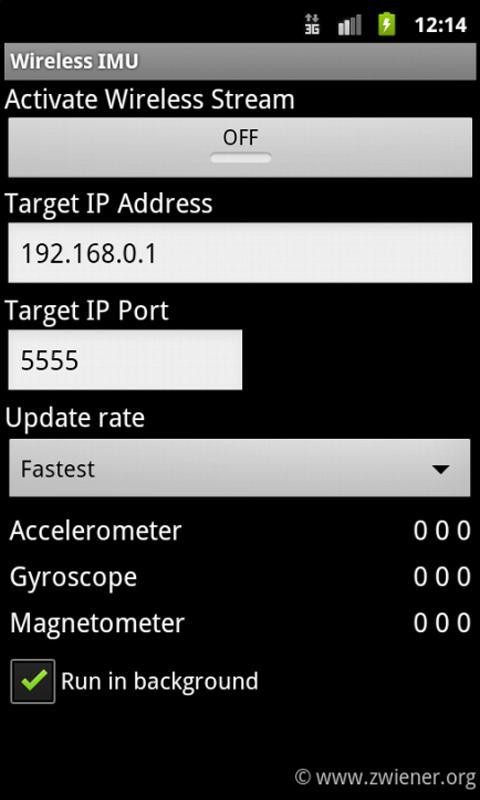
スマートフォンをワイヤレス慣性測定ユニット(IMU)に変えます。
このアプリは、CSV(Comma分離値)としてUDPを介して携帯電話の慣性センサーからネットワーク内のコンピューターに測定値を送信します。
これにより、携帯電話がワイヤレス慣性測定ユニット(IMU)に変わります。
次のセンサーがサポートされています。
- 加速度計
- ジャイロスコープ
- 磁力計
携帯電話にこれらすべてのセンサーがない場合、使用可能なセンサーデータのみが送信されます。
例UDPパケット:
890.71558、3、0.076、9.809、0.565、4、-0.559、0.032、-0.134、5、-21.660、-36.960、-28.140
Timestamp [sec]、sensorid、x、y、z、sensorid、x、y、z、sensorid、x、y、z
センサーID:
3-加速度計(m/s^2)
4-ジャイロスコープ(rad/s)
5-磁力計(Micro -Tesla UT)
このアプリをバックグラウンドで実行できます。
WiFiネットワークに接続されていない場合、警告ダイアログが表示されます。
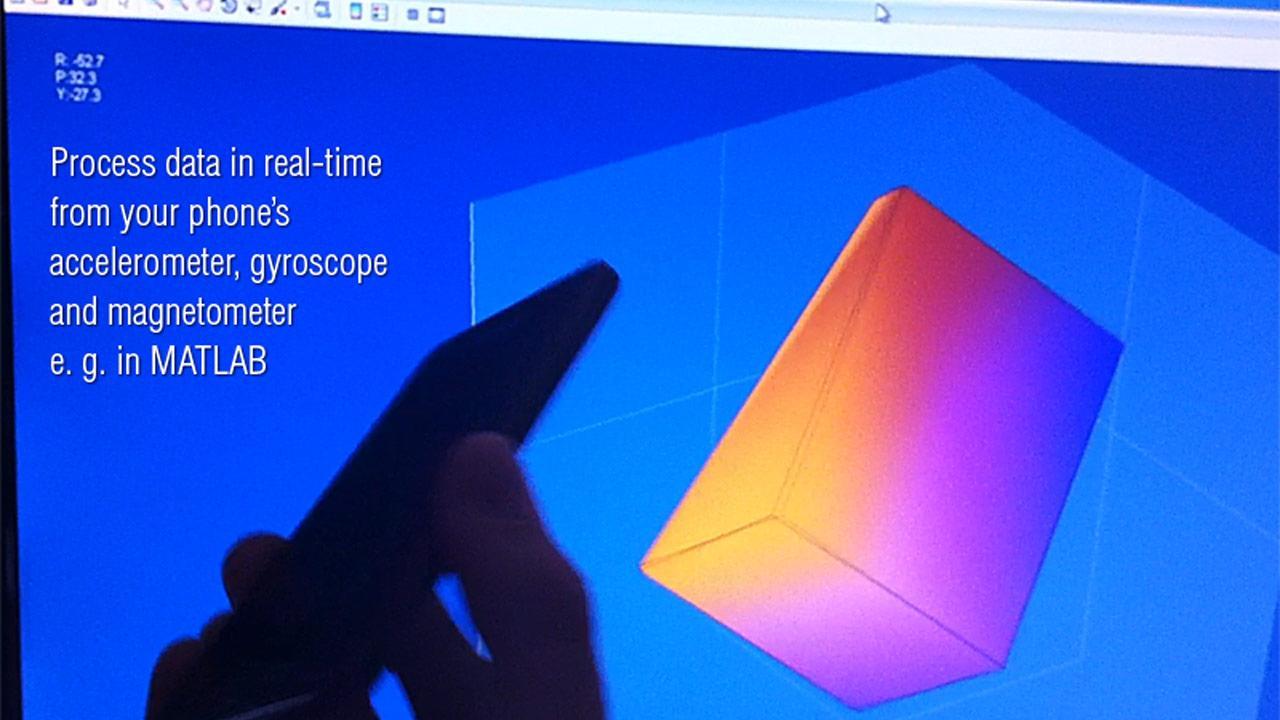
サンプルビデオでは、ストリームはKalmanフィルタリング用のMATLABスクリプトによって直接処理されます。しかし、それはあなた次第、あなたがデータで何をするかです。
次のPythonスクリプトを使用すると、携帯電話からUDPデータストリームをキャプチャできます。
#---------------------------------------------------------------------
ソケット、トレースバックのインポート
host = ''
ポート= 5555
s = socket.socket(socket.af_inet、socket.sock_dgram)
s.setsockopt(socket.sol_socket、socket.so_reuseaddr、1)
s.setsockopt(socket.sol_socket、socket.so_broadcast、1)
S.Bind((ホスト、ポート))
一方:
試す:
メッセージ、アドレス= s.recvfrom(8192)
メッセージを印刷します
を除いて(keyboardinterrupt、systemexit):
上げる
を除外する:
traceback.print_exc()
#---------------------------------------------------------------------
 同様の推奨事項
同様の推奨事項
January 22, 2026
January 22, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 21, 2026
January 20, 2026